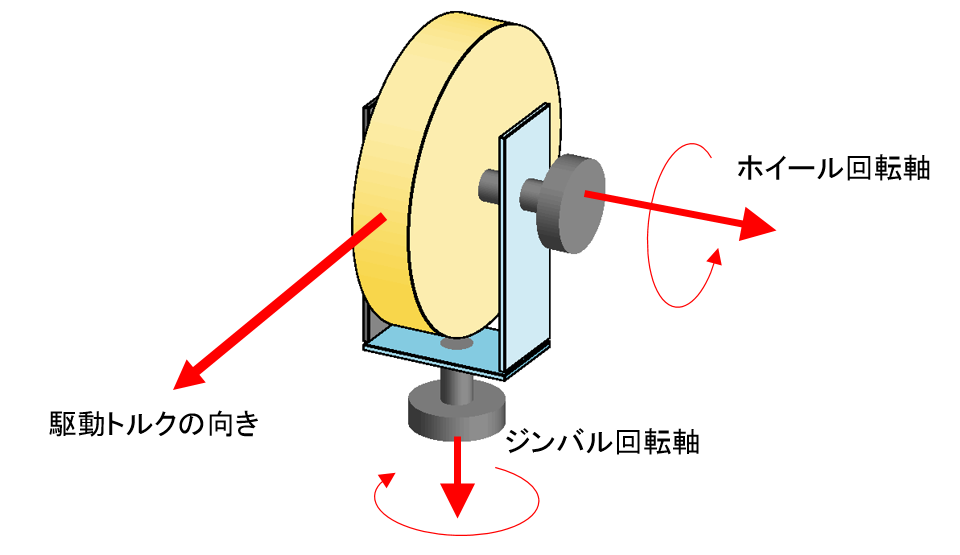
コントロールモーメントジャイロ(CMG)とは宇宙機の姿勢制御装置の一種で,ジンバル軸を回転させて一定回転しているホイールの角運動量軸方向を変化させることで大トルクを発生させる装置であり、国際宇宙ステーション(ISS)など大型構造物の姿勢制御や小型の人工衛星の迅速な制御に用いられています。
CMGを用いた姿勢制御では、目標の角度でピタリと停止させようとするとき、CMGには内部のジンバル軸周りに発生する摩擦が原因となり、永続的な微小振動(リミットサイクル)が発生する現象があることがわかっています。
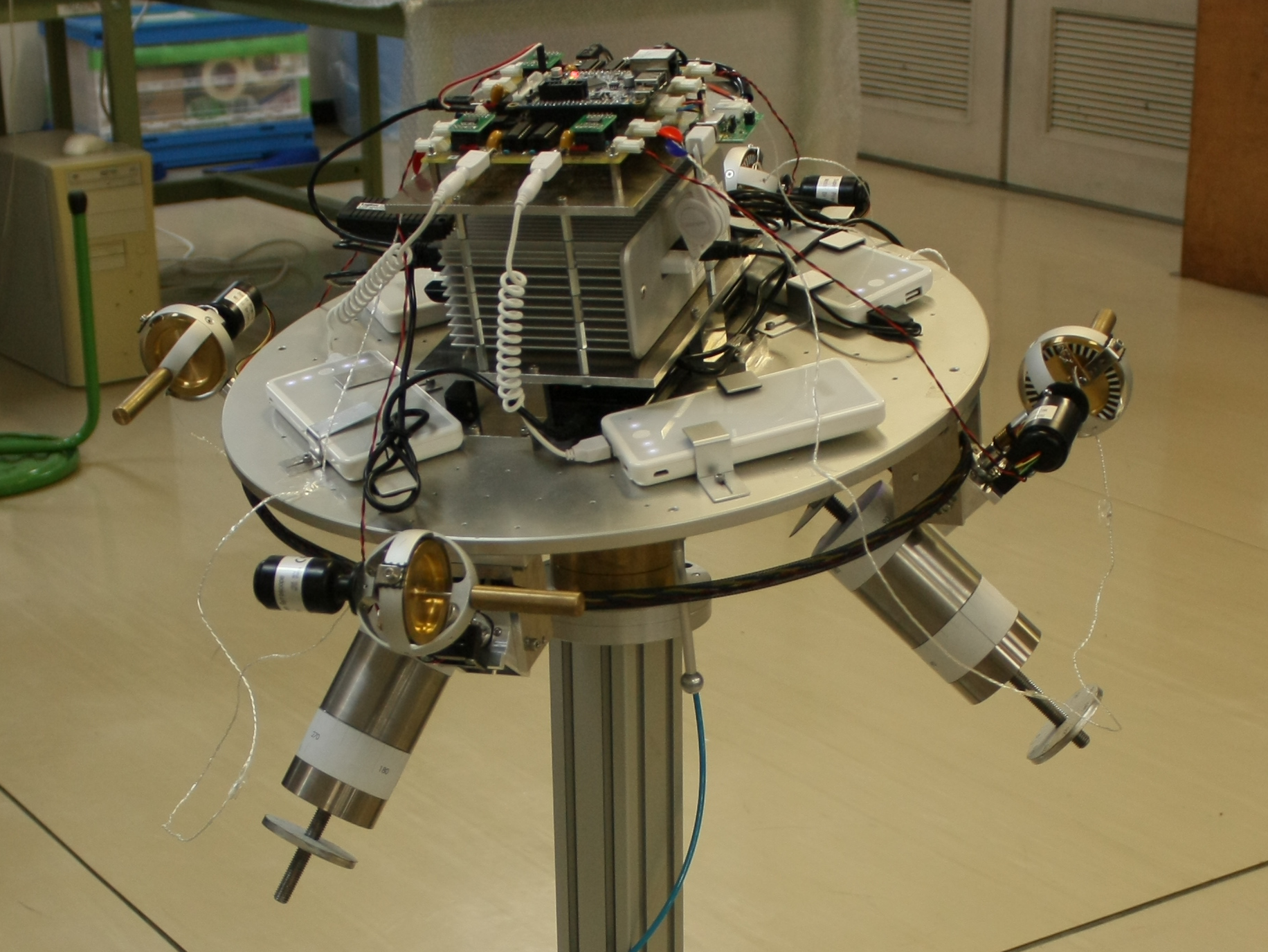
上の写真がリミットサイクルを調べるために開発したCMG実験装置です。
この実験装置は,宇宙空間での回転運動を再現するため圧縮空気により浮上されており、鉛直軸回りの抵抗が極めて少ない回転を実現できます。
動画はその様子を撮影し、6倍速で再生しているものです。このように、このままでは宇宙機が振動してしまい姿勢制御精度が劣化します。そこで、このリミットサイクルの予測法とそれを抑制する制御則を構築しました。
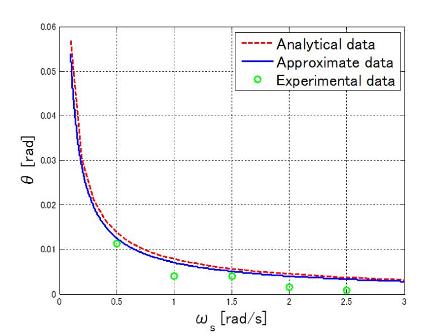
上のグラフは、摩擦モデルと積分器から成る非線形要素の記述関数を導き、数値解析法、近似法それぞれによる特性方程式の解から導いたリミットサイクルの振幅と、実験によって得られたリミットサイクルの振幅を比較したものです。
また解析解が得られたことで、リミットサイクルの存在を予測することが可能となりました。
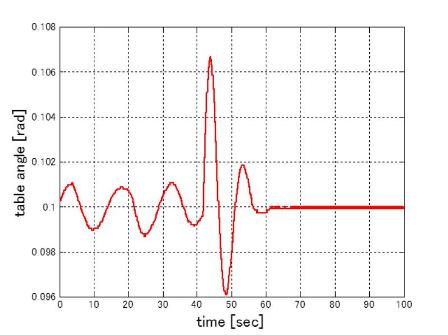
そして、このリミットサイクルを抑制するため摩擦補償則を設計し、実際に制御実験を行った結果が下のグラフです。
実験台はピタリと静止しており、リミットサイクルを予測し抑制するアルゴリズムと補償則の効果を実証できました。なお、本研究は科学研究費補助金21560817を受けて行われました。
CMGによる姿勢制御ではジンバル角の組み合わせによってはトルクを出力できない方向が存在し、この点を特異点と呼びます。
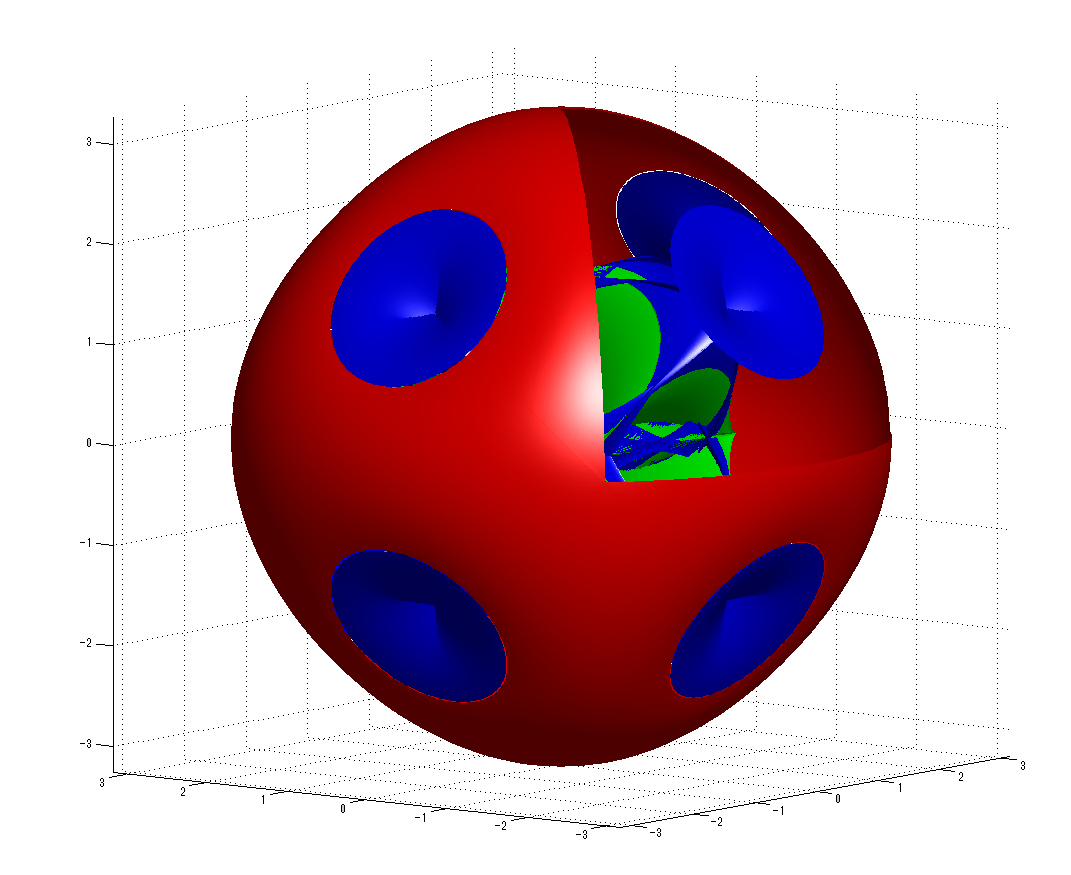
特異点は制御の観点上好ましくありません。以下の図は4台のCMGを用いたピラミッド型配置の特異点における角運動量を示しています。
4台CMGの特異点には4H特異点、2H特異点、0H特異点の3種類の特異点が存在します。図の赤色の部分は4H特異点での角運動量を示しており、これ以上大きな角運動量を出力できません(最大角運動量包絡面)。
青色・緑色の部分は2H、0H特異点を示しています。2H、0H特異点は内部特異点であり、これらの特異点を回避・通過するような制御則を構築する必要があります。(図では、内部特異点が見えるように最大角運動量包絡面の一部を省いています。)
特異点を回避・通過するような制御則を構築した後に、下の図で示すような空気浮上を用いて宇宙空間を再現した実験装置を用いて、実際にうまく制御ができるかどうかを確かめています。
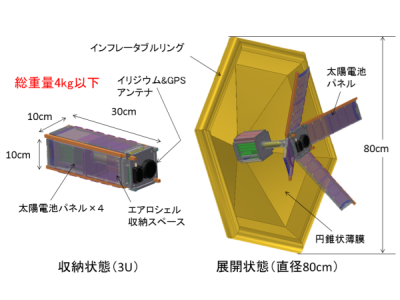
最近10年間で質量数kg程度、寸法10cm角程度の「超小型」人工衛星が盛んに開発され、軌道に投入されるようになりました。
このような超小型人工衛星においても、与えられたミッション遂行のため姿勢制御が必要なものが多くあります。
しかし、質量、体積、電力、コンピュータの処理能力等、全体のリソースが限られている超小型衛星では、ミッション機器にリソースを割くために、姿勢計測、制御機器に与えられるリソースはわずかです。
本研究室では、東京大学、JAXAが主導するMAAC-EGGプロジェクトに参画し、大気圏再突入実験を行う超小型衛星において、再突入前の衛星の姿勢制御と突入直前の姿勢推定を行います。
少ないリソースで十分な制御性能を得るために、機体に働く空気力や磁力などの環境トルクを最大限に利用した制御手法を研究しています。