宇宙機の軌道設計
宇宙機はそれぞれの持つミッションを遂行するために最適な軌道を設計する必要があります。ここでいう最適化の対象は、ミッションによって異なりますが、多くは時間や燃料を指します。
最適化の例としては、現在の軌道から別の軌道に遷移するために最適なスラスタの噴射方法や、静止軌道における外乱(太陽や月からの引力等)を考慮した軌道制御などがあげられます。
また、最近では複数の人工衛星がフォーメーションを作ってミッションを遂行するフォーメーションフライトも注目されています。以上のような宇宙機の軌道設計について、数値シミュレーションを用いて検討していきます。
▼ クリックで展開
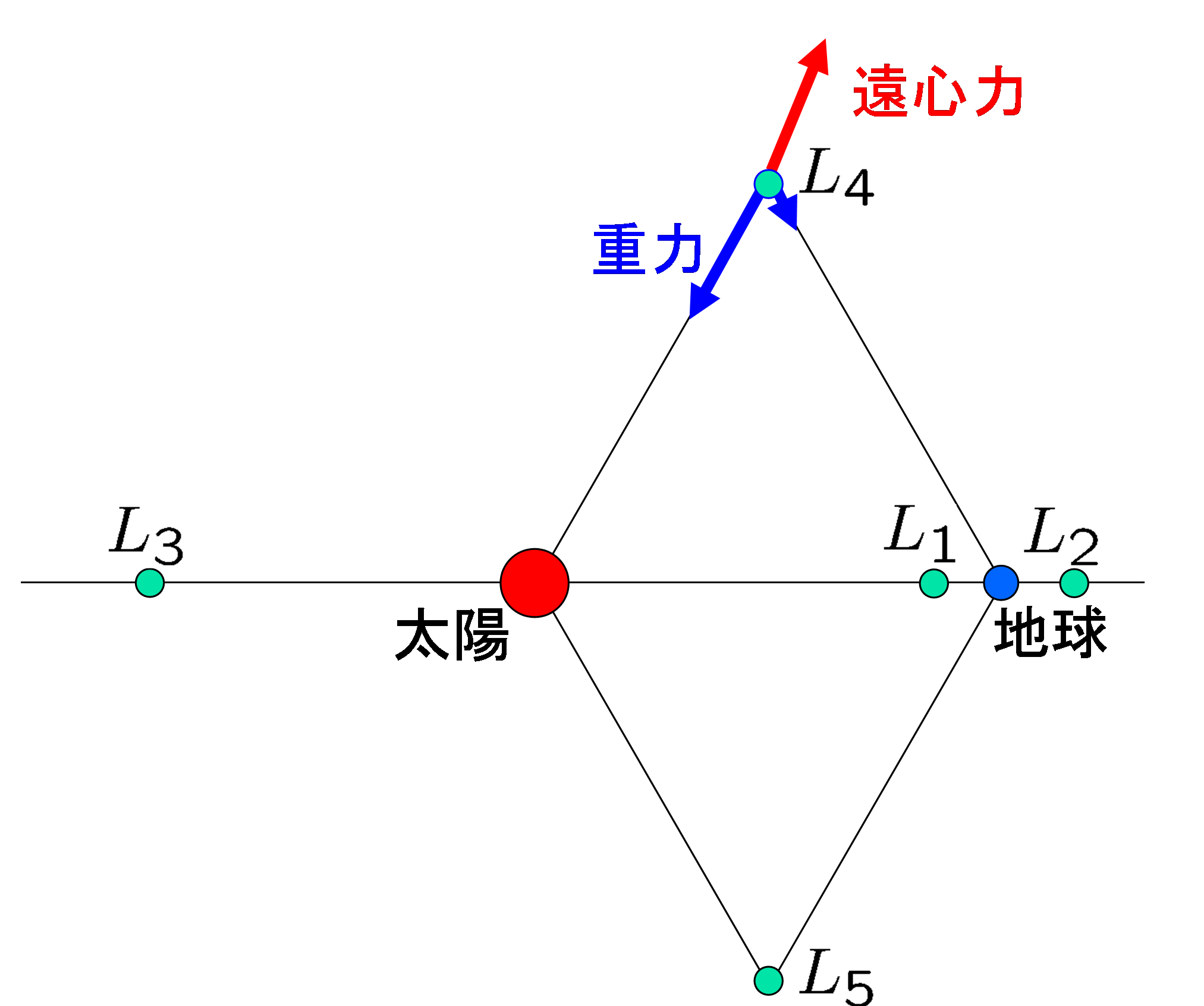
2つの天体があって一方が他方の回りを公転するとき、公転にともなって動く座標系上では天体からの重力と遠心力の釣り合う点が5点あり、これらをラグランジュ点L1~L5といいます。
このうちL1、L2、L3は2つの天体を結ぶ直線上にあり、L4、 L5は2つの天体と正三角形をなす点にあります。(たとえば太陽-地球系での例は下図)
これらの点の回りにはハロー軌道と呼ばれる閉じた運動軌道の存在することが知られており、公転する天体とともに公転するので、中心天体の観測や、深宇宙探査などに利用できる可能性があります。
このハロー軌道上での宇宙機の制御や、ハロー軌道への宇宙機の投入に関しては、多くの研究がなされています。われわれの研究室でも、公転軌道が離心率をもつときのハロー軌道の導出や、ハロー軌道上での宇宙機のフォーメーション制御などの研究を行っています。
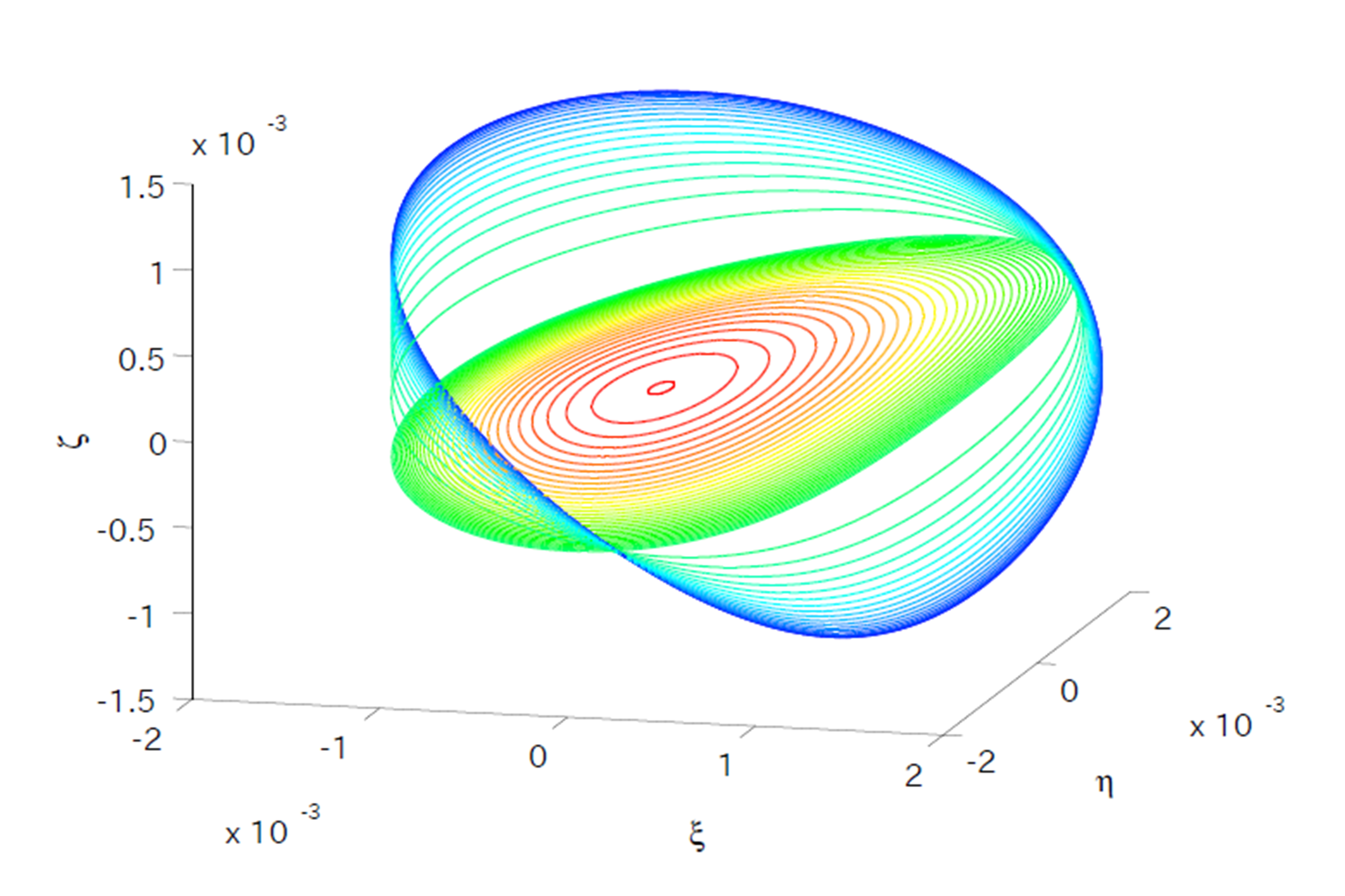
たとえばこの図はラグランジュ点回りの閉軌道の例を示しています。中心点がラグランジュ点L1になりますが、ヤコビ定数と呼ばれる運動定数の違いによって、公転面内の軌道や青線の軌道のように公転面外の成分をもつ軌道が得られます。
一般に、ハロー軌道と呼ばれる軌道は青線のような軌道をさし、その軌道半径は、太陽-地球系で数十万kmにも及びます。
宇宙機の軌道制御を行うために、燃料の燃焼反応を利用する化学推進か電気的なエネルギーを利用する電気推進のどちらかの推進機関が用いられます。
一般に化学推進は推力が大きいが効率が悪く、電気推進はその逆に推力は小さいが効率は優れています。たとえば静止衛星を静止軌道上まで遷移させる場合には、これまでは化学推進が用いられてきましたが、電気推進の高効率性を活かせば静止軌道に投入できる質量を増やすことができるので、電気推進による軌道遷移も検討されています。
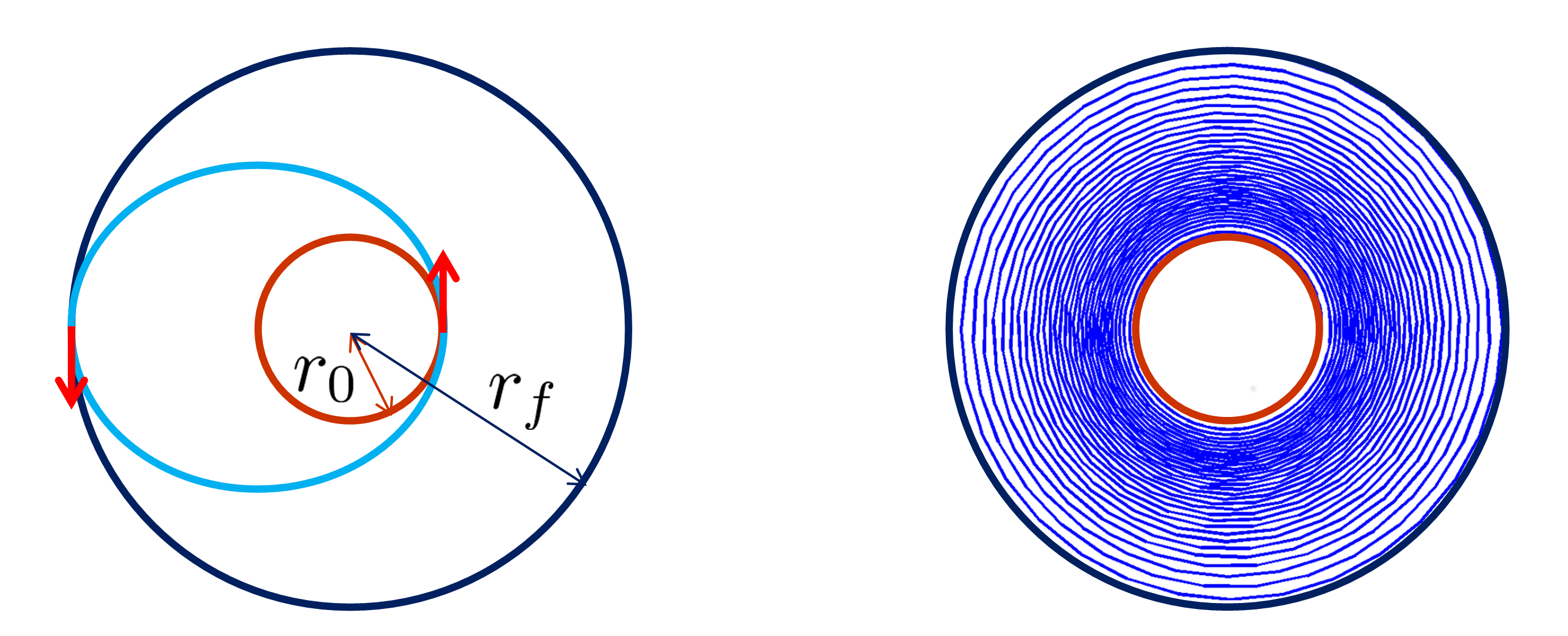
たとえば左の図はホーマン遷移と呼ばれる静止軌道への軌道遷移を表していますが、この図において赤矢印で示す箇所で2回のインパルス噴射を行うことで、低高度の円軌道から静止軌道へ軌道遷移させることができます。
これに対して、右の図は電気推進によって低高度の円軌道から静止軌道へ遷移させる場合を示しています。
この図のように、電気推進の場合にはほぼ連続的に噴射を行い、徐々に軌道高度を上昇させることになります。この場合は、軌道遷移をさせるのにも時間がかかることになりますが、最終的な静止軌道への投入質量を大きくとれるために注目されています。
われわれの研究室でも、初期軌道の種類や、太陽の向きとの関係など、いろいろな条件のもとでの、電気推進による効率的な軌道遷移について研究を行っています。
近年人工衛星のフォーメーションフライトが注目を集めています。
これはいくつかの人工衛星がある一定の相対関係を保ちながら飛行・協働することで、これにより高精度・立体的な観測が可能になるなどの利点があります。
しかし軌道解析の複雑化、総燃料・総重量の増加という課題があり、ここでこの研究室で研究した一例として、その燃料最小化問題を考えています。
今回は、いくつかの人工衛星が円を描きながら運動する円フォーメーションに注目し、 その円のサイズを変更する際に必要な燃料を最小化する遷移軌道を求めました。
アニメーションは、3機のフォーメーションフライトの様子です。
火星衛星探査計画Martian Moon eXploration (MMX)は、JAXA が現在2024 年の打ち上げを目指して計画を行っている火星衛星からの世界初のサンプルリターンミッションです。
MMXミッションのもっとも重要な目的は、この二つの火星衛星からサンプル採取を行い、鉱物学的特徴を観測することで火星衛星の起源を解明することです。
MMXミッションの着陸フェーズでは、これまでの「はやぶさ2」に代表されるようなごく短時間の天体接触と離脱によるサンプル採取ではなく、探査機自身が表面に降りた状態を維持し、サンプル採取を行うことが要求されるため、安定した着陸技術の確立はMMXのクリティカル技術の一つととらえられており、この技術の確立なしにサンプル採取の成功を見込むことは難しいと考えられています。
しかし、この安定した着陸制御を行うためには宇宙機の推力の制約や状態の制約など、複数の拘束条件を同時に扱いながら最適制御を行う必要があり、これは一般の制御手法では困難です。これを研究の動機付けとし、本研究室ではモデル予測制御に基づく着陸制御法を構築しています。
太陽系の地球型惑星の中で最も外側の惑星である火星は、かつて、生命を持つ地球と似た表層環境を保持しています。
現在、火星には2 つの衛星Phobos とDeimos が存在し、どちらも火星の赤道面上を円軌道運動しています。半径約11km 程のPhobos は火星質量の約1000 万分の1、さらに、半径約6km 程のDeimos は火星質量の約1 億分の1 と非常に小さく、半径1、500kmを超える地球衛星(月) とは大きく異なっています。
また、火星衛星の歪な形状と表面スペクトルは、火星と木星の間に存在する炭素質小惑星と類似しています。
これらの理由から、火星衛星の起源は、月の形成について最も有力な巨大衝突説ではなく、火星の重力によって小惑星が捕獲されたものであると考えられています。
しかし、両衛星の軌道が真円に近く、軌道傾斜角が非常に小さいという事実は捕獲説と調和しないと考えられ、捕獲説によって現在の衛星の軌道を説明することは極めて困難であることが指摘されています。
一方で、火星の北半球には太陽系最大のクレータ(ボレアレス平原) が存在し、このクレータは巨大天体の衝突で形成されたことが分かっています。
このことから、火星衛星は巨大天体衝突により生じた破片が集積し形成されたものである(巨大衝突説) と提案されましたが、現在に至るまで、火星衛星の具体的な形成過程を明らかにした研究はなく、火星衛星の存在は未だ謎であります。
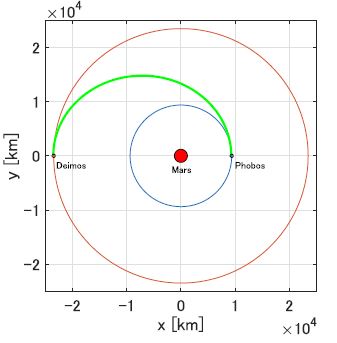
本研究室では,火星の二つの衛星Phobos,Deimos の探査における,Phobos の逆行周回軌道(DRO) からDeimos の逆行周回軌道(DRO) への軌道遷移(Transfer Orbit) の最適化について研究を進めています。

<< 研究一覧に戻る